










El DC-03 Pod está equipado con un cardán no ortogonal de tres ejes de alta precisión, y está equipado con una cámara de zoom híbrido amplia y 30X. Después de encontrar el objeto objetivo en la imagen de gran angular, puede cambiar rápidamente a la imagen de zoom para una observación detallada. El POD también está equipado con un telémetro láser, que puede proporcionar las coordenadas de distancia y posición del objetivo de observación, ayudar en un posicionamiento rápido y preciso, y mejorar la eficiencia operativa,
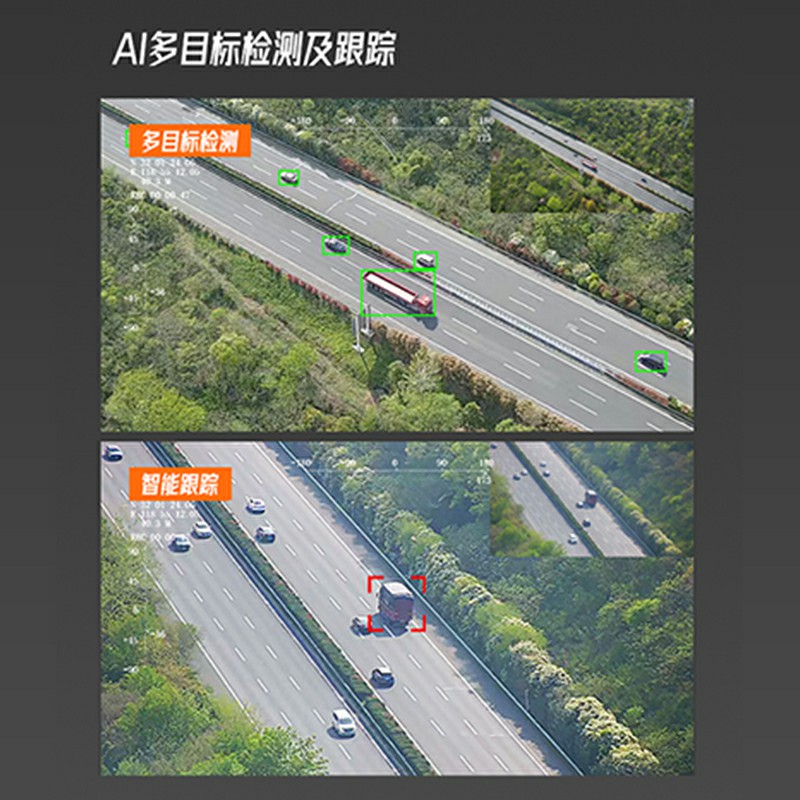
El POD DC-03 tiene capacidades de detección y seguimiento de objetivos múltiples de AL. El Pod puede reconocer de manera inteligente a los peatones y vehículos en la imagen capturada y bloquear y rastrear continuamente cualquier objetivo. El POD DC-03 admite la instalación hacia adelante e inversa, y se puede instalar rápidamente en varios vehículos aéreos no tripulados u otras plataformas de transportistas sin la necesidad de herramientas. Combinado con GCU y Software de pantalla y control de librería, puede mostrar imágenes en tiempo real en la computadora y controlar el POD, admitiendo la fotografía y la grabación de video.
Equipado con capacidades de detección y seguimiento de AI multi-objetivo, puede reconocer de manera inteligente a los peatones y vehículos en las imágenes capturadas y bloquear y rastrear continuamente cualquiera de ellos. La cámara de zoom híbrido de gran angular y 30x forman una combinación de doble campo de vista, lo que permite un cambio rápido entre la vista global y las imágenes de detalles.
El telémetro láser puede proporcionar las coordenadas de distancia y posición del objetivo observado, ayudando en posicionamiento rápido y preciso.
Adoptando una forma esférica de tamaño pequeño y una estructura estabilizadora mecánica de tres ejes no ortogonal, nos esforzamos por minimizar el radio de giro y la resistencia al viento. El eje de guiñada puede girar continuamente 360 ° XN.
Coopere con GCU para soportar la red, el puerto serie y el control de bus S, compatible con protocolos privados y protocolos de enlaces MAV, facilitando el desarrollo secundario.
Al usar el algoritmo complementario de Dual IMU, combinado con el control de temperatura de la IMU y la fusión de datos de navegación de inercia del portador, la precisión de la estabilización de la imagen puede alcanzar ± 0.01 °, y el POD aún puede permanecer estable durante las maniobras severas del portador.
Admite la instalación vertical e invertida, lo que permite una instalación rápida en varias plataformas de operadores.
Junto con GCU y el software de pantalla y control de librería, se puede lograr una visualización en tiempo real de imágenes en la computadora sin la necesidad de integración de protocolo, al tiempo que permite el control de la cápsula.
El software QGC personalizado se puede combinar con controladores de vuelo de código abierto para lograr todas las funciones del POD.
La pantalla admite información de OSD como latitud, longitud y altitud en Rongjia. Las fotos admiten escribir las coordenadas de la información del punto de disparo exif. Las transmisiones de video admiten agregar SE1
14 ~ 53 VDC Entrada de voltaje de ancho

Este soporte de lanzamiento portátil para drones de alta capacidad ofrece una capacidad de carga útil de 40 kg con eyección de doble motor, diseñado para un despliegue estable con viento cruzado de drones de ala fija. Su diseño plegable de grado aeronáutico garantiza un rápido montaje en campo, ideal para misiones de reconocimiento militar e industriales. Consulte las especificaciones técnicas para obtener soluciones aéreas robustas.
Detalles
La pinza para drones ZS-035 cuenta con un accionamiento neumático preciso que permite agarrar, transferir, adsorber y liberar objetos en entornos sensibles y frágiles, con espacio limitado y complejidad desconocida, entre otros. Es resistente al agua y al polvo, gira libremente y se adapta con flexibilidad a diferentes tipos de drones. Se utiliza ampliamente en servicios públicos de infraestructura, toma de muestras en entornos peligrosos, operaciones a gran altitud y recuperación y rescate ante desastres.
Detalles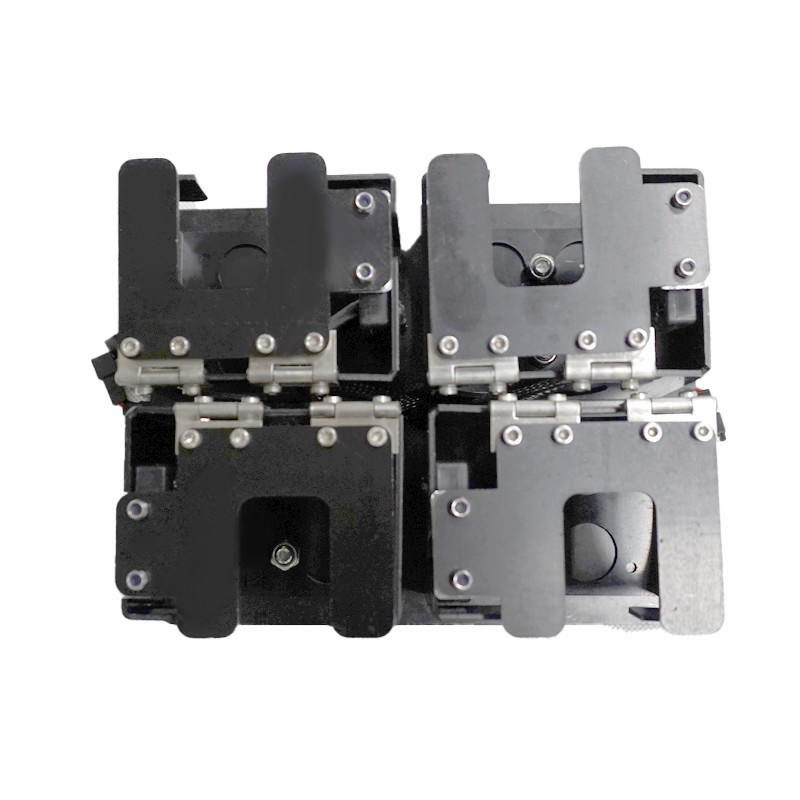
Este producto se puede usar con el mortero 60 para proyectiles de precisión, la estructura de la lengua de bloqueo unidireccional incorporada es segura y sólida, y puede realizar una operación de carga de electricidad y operación de carga aérea. El producto se puede utilizar con UAVS por encima de 3 kg de capacidad de carga para lograr una variedad de combinaciones de números de canal y configuraciones de software, con modificaciones de software de software y modificadores de software integrados.
Detalles
Este Cámara de drones de cardán de 3 ejes industriales integra la tecnología de zoom híbrido de vanguardia y los algoritmos de estabilización FOC para proporcionar imágenes claras incluso durante maniobras de alta velocidad. Diseñado para inspección aérea y vigilancia de seguridad misiones, su tecnología anti-sacudida garantiza la precisión a nivel de milímetro en mapeo de alta precisión aplicaciones. La carcasa rugosa permite operar estable en ambientes ventosos, mientras el teleobjetivo de largo alcance Capacidad (30x óptico + 120x zoom digital) captura detalles críticos a 500 m de distancia. Compatible con sistemas de imágenes de UAV estándar, es lo último cámara de drones para operaciones de entorno ventoso requiriendo confiabilidad y claridad.
Detalles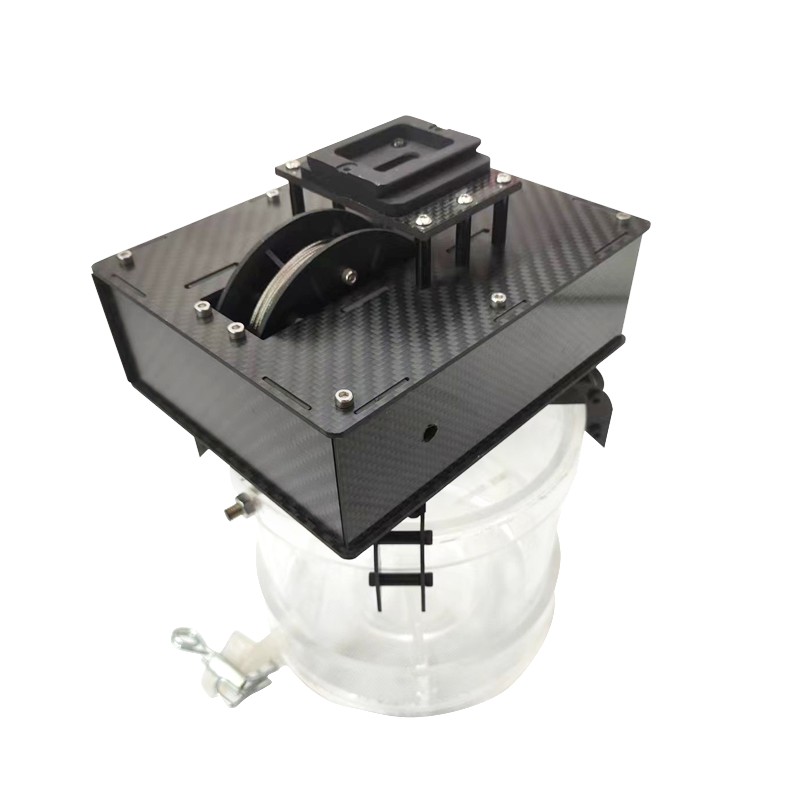
El dispositivo de extracción de agua de UAV QS-1.5 está bien hecho, un diseño de estructura único y está hecho de materiales de alta síntesis resistentes a la corrosión. Las muestras de agua se pueden tomar automáticamente de ríos, ríos y otras áreas por el UAV montado para mejorar la eficiencia de la recolección de muestras de agua. El dispositivo de despegue desarrollado de forma independiente por nuestra compañía, que muestra la profundidad de la precisión de muestreo en tiempo real, para lograr una colección más precisa.
Detalles
El DC-03 Pod está equipado con un cardán no ortogonal de tres ejes de alta precisión, y está equipado con una cámara de zoom híbrido amplia y 30X. Después de encontrar el objeto objetivo en la imagen de gran angular, puede cambiar rápidamente a la imagen de zoom para una observación detallada. El POD también está equipado con un telémetro láser, que puede proporcionar las coordenadas de distancia y posición del objetivo de observación, ayudar en un posicionamiento rápido y preciso, y mejorar la eficiencia operativa,El POD DC-03 tiene capacidades de detección y seguimiento de objetivos múltiples de AL. El Pod puede reconocer de manera inteligente a los peatones y vehículos en la imagen capturada y bloquear y rastrear continuamente cualquier objetivo. El POD DC-03 admite la instalación hacia adelante e inversa, y se puede instalar rápidamente en varios vehículos aéreos no tripulados u otras plataformas de transportistas sin la necesidad de herramientas. Combinado con GCU y Software de pantalla y control de librería, puede mostrar imágenes en tiempo real en la computadora y controlar el POD, admitiendo la fotografía y la grabación de video.
Detalles
Este Sistema de sensor de drones de detección de múltiples gases brindar Monitoreo de calidad del aire en tiempo real UAV capacidades, integrando más de más de 100 sensores reemplazables Detectar CO2, PM2.5, VOC y gases tóxicos como H2S. Diseñado para Detector de fugas de VOC industrial Las aplicaciones y las verificaciones de cumplimiento ambiental, su transmisión de doble modo 4G/WiFi ofrece mapas de contaminación instantánea a las estaciones fundamentales. El registrador de datos atmosféricos autónomos admite interfaces chinas/inglesas, habilitando Mapeo de drones inalámbrico PM2.5 a través de fábricas, vertederos y zonas de desastre. Con la trayectoria de vuelo mapas de calor y la comparación de datos históricos, es lo mejor Herramienta de encuesta ambiental de doble lenguaje para equipos de seguridad industrial e inspectores de la EPA.
Detalles
En la rápida evolución tecnológica actual, el equipamiento militar también innova constantemente. El innovador cañón Tipo 95, montado en el dron, es como una nueva estrella brillante que brilla con fuerza en el escenario militar moderno.
Detalles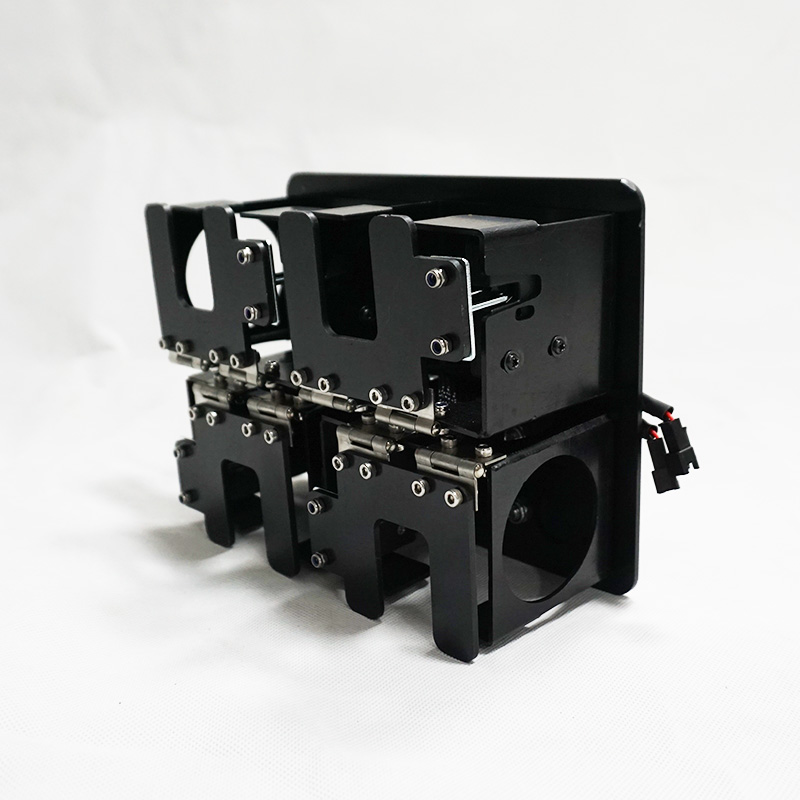
Diseñado para golpes de alta precisión y despliegue rápido en el campo de batalla, nuestro Lanzador de mortero montado en dron guiado con precisión entrega Precisión del objetivo de 3 m dentro de un Alcance de control de 5 kmIdeal para misiones tácticas y respuesta a emergencias. Explora las especificaciones avanzadas y las características de combate a continuación.
Detalles
Diseñado para precisión y velocidad, nuestro Lanzagranadas de humo de despliegue rápido y carga múltiple montado en dron entrega Despliegue de humo táctico a gran altitud con Adaptabilidad multiescenario de 38 mmIdeal para operaciones antiterroristas y de emergencia. Explore las especificaciones avanzadas y las características de misión a continuación.
Detalles
El módulo de cuatro luces LQ-4 integra módulos de imagen térmica, zoom, medición láser y gran angular, logrando una detección precisa en cualquier condición climática mediante la colaboración de datos de múltiples fuentes. Equipado con un sistema de imagen térmica de alta resolución y función de medición de distancia de largo alcance, combinado con tecnología de zoom híbrido y zoom óptico de alto aumento, junto con elementos fotosensibles de gran tamaño para permitir la grabación de imágenes de ultraalta definición, y con una lente gran angular de alta definición para ampliar el campo de visión. La plataforma de algoritmo inteligente integrada proporciona capacidad de seguimiento dinámico de objetivos basada en aprendizaje profundo, y el diseño de rotación global del eje de rumbo se adapta a requisitos de ángulo operativo complejos. La optimización de la estructura de absorción de impactos y la interfaz modular mejora significativamente la adaptabilidad ambiental, lo que facilita la expansión e integración de múltiples dispositivos. Con algoritmos de control altamente colaborativos y sistemas de cardán estables, puede mantener imágenes nítidas y un control preciso en escenas dinámicas, y es ampliamente aplicable a requisitos de montaje de nivel profesional en campos como aeronaves de ala rotatoria, plataformas de despegue y aterrizaje verticales y robots móviles inteligentes. Este sistema de telémetro láser termográfico de alta resolución integra cuatro sensores avanzados para ofrecer una percepción ambiental en cualquier condición climática para drones y robots. Con seguimiento dinámico e imágenes ultra HD, garantiza una claridad crucial para misiones de rescate, cartografía de terrenos e inspecciones industriales.
Detalles
El módulo de luz dual adopta un diseño colaborativo de detección dual de luz visible/imágenes térmicas, con una estructura ligera que mejora la percepción multidimensional del dron. El módulo de imagen térmica está equipado con sensores de alta resolución y teleobjetivos, lo que permite la medición de temperatura sin contacto y la identificación de fuentes de calor anormales. Los algoritmos inteligentes permiten el seguimiento continuo del objetivo y un rebloqueo rápido, mientras que el zoom/unión sincronizados de doble lente mejoran la eficiencia de la información. Los sensores de imagen de alta definición, combinados con la tecnología de ajuste dinámico, optimizan la calidad de la imagen, y el amplio ángulo de giro y inclinación permite la observación panorámica, adaptándose a las necesidades de escenas complejas.
Detalles




 IPv6 network supported |
Mapa del sitio
|
Xml
|
blog
|
política de privacidad
|
Noticias
IPv6 network supported |
Mapa del sitio
|
Xml
|
blog
|
política de privacidad
|
Noticias
Nuestro horario
Lun 11/21 - Mié 11/23: 9 am - 8 pm
Jue 11/24: Cerrado - ¡Feliz Día de Acción de Gracias!
Vie 11/25: 8 am - 10 pm
Sábado 11/26 - Sol 11/27: 10 am - 9 pm
(Todas las horas son hora del este)










