










El sistema colaborativo multidimensional y multibanda de monitoreo de objetivos pequeños de baja velocidad, alerta temprana y detección de daños se puede instalar de manera flexible en plataformas móviles como vehículos no tripulados, camionetas, vehículos blindados o puntos de monitoreo fijos como puestos de avanzada y estaciones fronterizas, para alerta temprana, interferencia y ataque de enjambres de drones entrantes, resolviendo los problemas de protección de los puntos de control fronterizos, importantes instalaciones aeroportuarias, etc.
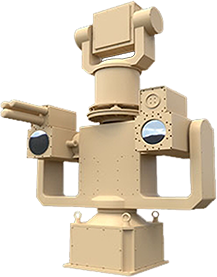
El sistema consta de una sección de monitoreo, una sección de seguimiento e identificación, una sección de destrucción y ataque, y una plataforma de centro de control; La parte de monitoreo está compuesta por un radar y es responsable de tareas como la detección de objetivos y la generación de trayectorias de objetivos; La plataforma giratoria fotoeléctrica está compuesta por luz visible, infrarrojo de onda larga, plataforma giratoria, etc. Principalmente responsable de capturar, bloquear, rastrear e identificar objetivos; Destruir objetivos peligrosos fuera del área controlada; La plataforma del centro de control incluye módulos funcionales como administración del sistema, plataforma giratoria óptica electrónica, radar, datos de vehículos aéreos no tripulados, equipo de interceptación y situación del área de administración.
Ⅱ Parámetros de rendimiento
El sistema consta de tres partes: radar, plataforma giratoria óptica electrónica y ataque láser. Sus indicadores de rendimiento son los siguientes:
Índice general | Operante radio de distancia | Radio de 5m a 6km |
Métodos de trabajo | Manual/Automático Opcional | |
Tamaño objetivo | 10cm*10cm | |
Horario de trabajo | 24/7 | |
Velocidad objetivo | 50EM | |
Altura | 1,9 millones | |
Altitud de vuelo | 1000 metros | |
Peso | 150 kilos | |
RAdar | Banda de frecuencia de trabajo | Banda C/Banda K/Banda X |
Potencia de transmisión | 80 W/3 W | |
Frecuencia central | 5.8GHz~6GHz/24 GHz~24,5 GHz | |
Ancho de banda de la señal | 10m | |
Frecuencia de repetición | 16 kHz | |
Frecuencia de muestreo | 20 MHz | |
Ganancia de antena | 28,5 dB/10 dB | |
Velocidad de rotación de la antena | 120°/s | |
Distancia de funcionamiento | Mínimo ≥ 240 m/10 m, máximo ≤ 3 km/1 km | |
Plato giratorio fotoeléctrico | Rango de acimut | n×360° |
Precisión estable | ≤30u rad | |
Rango de ángulo de elevación | -45°~ +225° | |
Precisión de posicionamiento | 2n millas/h | |
Velocidad máxima azimutal | ≥45°/S | |
Escaneo de ventiladores | Ángulo horizontal, ángulo de inclinación y velocidad ajustables. | |
Velocidad máxima de paso | ≥30°/S | |
Escaneo de capas | Se pueden ajustar los ángulos horizontales y de inclinación inicial y final, así como la velocidad. | |
Velocidad mínima de rotación | ≤0,1°/S | |
Intercambio de datos | Interacción en tiempo real de ángulos horizontales y de inclinación bidireccionales, así como de la distancia focal del objetivo y los valores de enfoque. | |
Sistema de imágenes de luz visible | Tamaño de la imagen: 1/2 pulgada | |
Apertura: F1.5-360 | ||
Puerto de conexión: C | ||
Ángulo de visión: 35° -1,5° | ||
Distancia del objeto más cercano: 2,9 m | ||
Cámara: 1/2 pulgada | ||
Píxeles de imagen efectivos: 1920 * 1080 | ||
Iluminación del tamaño de la imagen: < 0,02 LUX; <0,003 LUX (modo blanco y negro) | ||
Relación señal/ruido: >50dB | ||
Consumo de energía: 5W | ||
Sistema de imágenes térmicas | Tipo de detector: Micro infrarrojo no frío calorímetro | |
Resolución: 640 * 512 | ||
Espaciado de píxeles: 25 um | ||
Sensibilidad: ≤ 80 mk a f/1.0 300 K | ||
Velocidad de cuadros: 50 Hz | ||
Banda de respuesta: 8-14 um | ||
Lente termográfica; Método de enfoque: manual/eléctrico | ||
Distancia de enfoque: ∞~10 m | ||
Apertura: 1.0 | ||
Distorsión: 0,2% | ||
Método de interfaz: M46X0.75 | ||
Distancia trasera: 18 mm | ||
Láser | Longitud de onda | 1064(532)nm |
Fuerza | 2000W | |
Distancia de iluminación | 2 kilómetros | |
Distancia del daño | 50-450 metros | |
Distancia ciega | 1,2 km | |
Tiempo de destrucción | ≤2S | |
Método de enfriamiento | Refrigeración por agua | |
Temperatura de trabajo | -40--+60℃ |
III.I Monitoreo (monitoreo radar+fotoeléctrico)
III.II Detección (detección por algoritmo, objetivo pequeño, detección de objetivo por infrarrojos, determinación de cuál es el objetivo)
III.III Descubrimiento (hallazgo de objetivos en el campo de visión)
III.IV Captura (Seleccionar cuadro y objetivo)
III.V Bloquear (Seleccione la casilla para bloquear el objetivo)
III.VI Seguimiento (el objetivo siempre se ejecuta en el cuadro seleccionado)
III.VII Advertencia de alarma (Alarma de bloqueo de objetivo por parte del centro de monitoreo)
III.VIII Iluminación láser (Cuando la distancia del objetivo sea de 1200 metros, encienda la iluminación láser para mejorar el brillo del objetivo y hacer que los gráficos de video sean más claros)
III.IX Ahuyentador láser (Cuando el objetivo está a 1000 metros de distancia, se emite un láser estroboscópico para ahuyentarlo).
III.X. Cegamiento por láser (Cuando el objetivo se encuentra a una distancia de 800 metros, se utiliza un láser para irradiar la cámara del objetivo u otro equipo de adquisición de imágenes, lo que provoca que el dispositivo quede ciego y no pueda capturar imágenes de vídeo).
III.XI Daño láser (Cuando el objetivo se acerque a 200 metros, opere y active manualmente un láser fuerte para dañar el objetivo).
III.XII. Almacenamiento y reproducción
Puede monitorear y advertir sobre daños a varios objetivos aéreos, como drones, aeronaves pequeñas de baja velocidad, misiles de crucero, aeronaves ligeras, modelos aeroespaciales, aeronaves ligeras y ultraligeras (incluidos helicópteros ligeros y ultraligeros) / planeadores, alas delta motorizadas, globos aerostáticos, dirigibles, planeadores motorizados, drones, globos libres no tripulados, globos atados, cometas grandes, etc. (las 24 horas del día) (también se puede aplicar a actividades como deshielo, remoción de objetos extraños a gran altitud, ahuyentamiento de aves, tala de árboles, etc.)
Los vehículos aéreos no tripulados (UAV) de baja altitud representan una amenaza significativa para la gestión de la base. Si bien estos vehículos están cada vez más desarrollados, el equipo de defensa para vuelos a baja altitud aún no lo está. Por lo tanto, la necesidad urgente de contrarrestar los ataques con drones, especialmente la detección y ataque de enjambres de drones en condiciones adversas de guerra, se ha convertido en una necesidad urgente para la base.
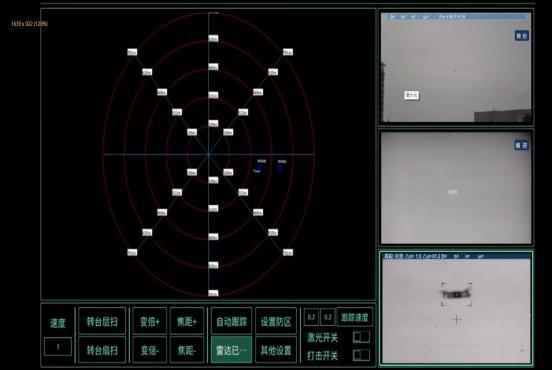
Plataforma del centro de control
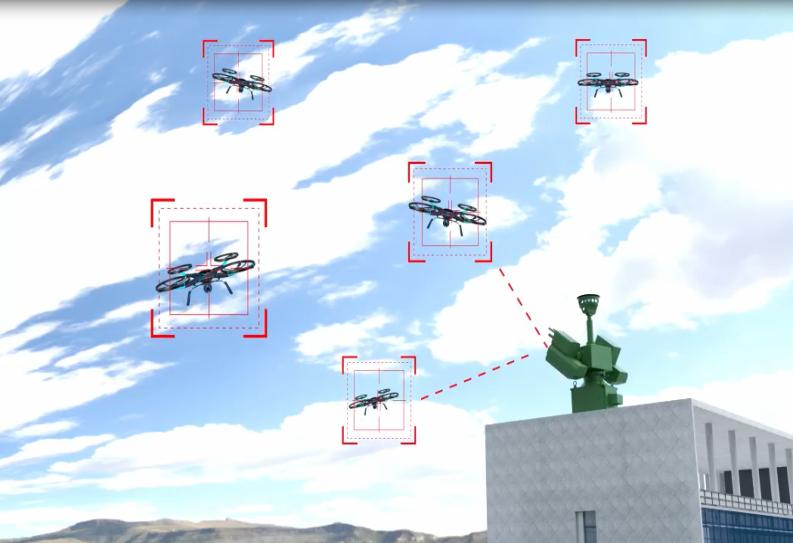
Diagrama de protección de baja altitud en la gestión de la base

El potente sistema de detección de drones e intercepción de interferencia utiliza una matriz de antenas de matriz múltiples, que cubre el rango de frecuencia de trabajo común, excelente amplitud y consistencia de fase, muy baja influencia de acoplamiento mutuo de antena, la influencia de acoplamiento mutuo, puede proporcionar una buena dirección, una excelente capacidad antiinterferencia en el entorno real, incluso en el entorno de un gran número de señales reflejadas, el sistema aún puede proporcionar una dirección acordada.
Detalles
El sistema colaborativo multidimensional y multibanda de monitoreo de objetivos pequeños de baja velocidad, alerta temprana y detección de daños se puede instalar de manera flexible en plataformas móviles como vehículos no tripulados, camionetas, vehículos blindados o puntos de monitoreo fijos como puestos de avanzada y estaciones fronterizas, para alerta temprana, interferencia y ataque de enjambres de drones entrantes, resolviendo los problemas de protección de los puntos de control fronterizos, importantes instalaciones aeroportuarias, etc.
Detalles
El rastreador fotoeléctrico GD-06 UAV adopta tecnología de diseño estandarizada y modular, con buena escalabilidad. Utiliza de manera integral dos sensores ópticos pasivos, cámaras de luz visibles y imágenes térmicas infrarrojas, y tiene un módulo de seguimiento automático integrado para lograr la codificación de imágenes multicanal, detección de objetivos, descubrimiento, reconocimiento, bloqueo y seguimiento de funciones bajo el mismo núcleo.
Detalles
Este radar portátil de vigilancia de baja altitudproporcionaseguimiento de objetivos de alta precisiónconsupresión adaptativa del desordenpara aplicaciones de seguridad críticas. Eltecnología de formación de haz digitalpermitemonitoreo de múltiples objetivosconbajas tasas de falsas alarmas, lo que lo hace ideal paraoperaciones de seguridad de despliegue rápidodonde la detección confiable y el seguimiento preciso son esenciales para un conocimiento integral del espacio aéreo.
Detalles
El FTH-B03 es un dispositivo portátil de detección y contramedidas tipo mochila que integra funciones de detección y contramedidas. Su diseño modular de mochila equilibra movilidad y practicidad. Está equipado con un sistema de detección inteligente, una palanca de control profesional y admite modos duales de reconocimiento de escaneo totalmente automático e intervención manual precisa. Cuenta con alarmas vibratorias y sonoras. El sistema ofrece una configuración flexible de múltiples bandas de frecuencia, personalizables según las necesidades, y admite despliegue independiente o modos de trabajo colaborativo en red. Su estructura integrada integra sistemas de energía eficientes, considerando los métodos de suministro eléctrico tanto en interiores como en exteriores. Su diseño ergonómico y ligero facilitan un despliegue rápido. El sistema completo logra un control total del proceso de detección, análisis y eliminación mediante una interfaz inteligente de interacción persona-computadora, y es ideal para tareas de seguridad a baja altitud en diversos entornos complejos.
Detalles




 IPv6 network supported |
Mapa del sitio
|
Xml
|
blog
|
política de privacidad
|
Noticias
IPv6 network supported |
Mapa del sitio
|
Xml
|
blog
|
política de privacidad
|
Noticias
Nuestro horario
Lun 11/21 - Mié 11/23: 9 am - 8 pm
Jue 11/24: Cerrado - ¡Feliz Día de Acción de Gracias!
Vie 11/25: 8 am - 10 pm
Sábado 11/26 - Sol 11/27: 10 am - 9 pm
(Todas las horas son hora del este)









